
事業内容
コア技術紹介

CADモデルや人力でのロボット教示に依存せず、3次元計測データを元に即時に工具経路を生成します。
これまでロボット導入が困難だった分野の自動化を実現
- CADモデルがない製品の加工
- 変形など個体差が生じやすい製品の加工
- サイズ違いなど多品種の製造工程
- 仕様変更に対し都度ティーチングが必要だった工程
産業用ロボット・医療用ロボットへの導入実績
- 個体差およびサイズ違いのある量産品のシーリング・塗装ロボットの工具経路生成
- 大型鋳型金型部品のサンドブラスト作業自動化のためのロボットの工具経路生成
- 各患者対応の骨切削における軟組織干渉回避による工具経路生成
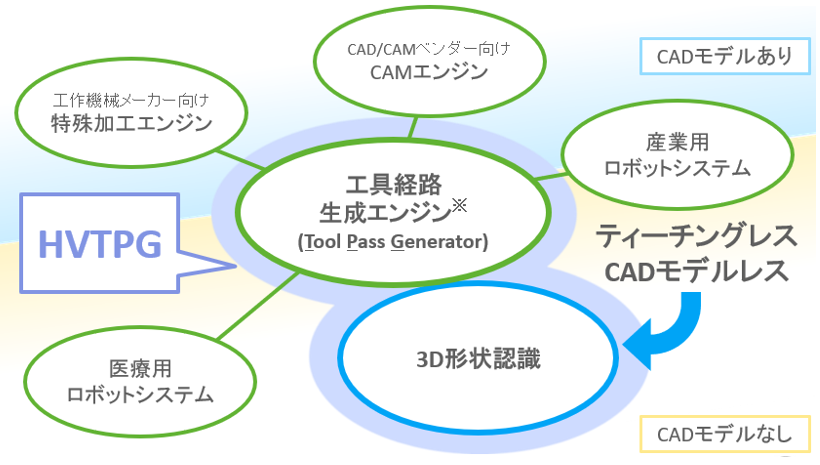
HV-TPGは、製造業向けCAMソフトウェアにおける工具経路生成アルゴリズムをコア技術とし、特殊加工への対応や多軸医用加工ロボット(※)への応用研究などを経て、空間形状認識技術と融合、CADモデルが無くても工具経路生成が可能なエンジンとして発展を遂げてきました。
現在は産業用ロボットによるティーチングレスシステムの実用化、危険作業および重労働作業の自動化に向けてさらなる開発を進めています。
(※) 東京大学大学院工学系研究科機械工学専攻 光石・杉田研究室との共同開発による人口膝関節置換手術ロボット
HV-TPGの自動化事例
大型鋳造金型部品のサンドブラスト作業自動化
これまで人力で行われていた、大型鋳造金型部品の表面を滑らかにするためのサンドブラスト作業を、
3次元高精度ステレオカメラと6軸垂直多関節ロボットを用いて自動化しました。
対象の金型は箱型であること以外は形状が異なり、個体差が大きく、ロボットティーチングによる自動化が困難であったため、弊社の技術が用いられました。
これにより、粉塵が舞う中で防護スーツに身を包み、重たい装置を動かす過酷な業務から、作業者を開放しました。
HV-TPGの導入提案
ロボットによるバリ取り自動化の支援システム
バリ取りロボットを用いた自動化の際、システム運用の大きな障壁となるワークの個体差への対応をHVTPGの加工パス自動生成機能が支援します。
CADモデルから生成した加工パスをワーク1点ごとに補正するのではなく、3次元高精度レーザースキャナで取得したワークの立体データから加工パスを自動で生成します。
また、同型ワークの加工指示をアノテーションすることで、エッジの歪みなどの個体差があっても同じ加工を施すことができます。
研究事例
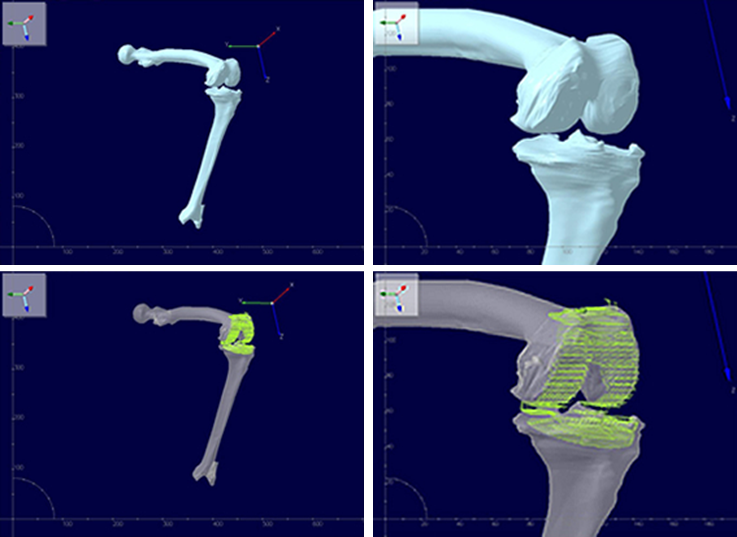
3次元CT画像から抽出した骨形状を元に、切削工具を狭い開創部から進入させ、周囲の組織を損傷することなく、広く深い領域の骨を切除する工具経路を生成する機能を開発しました。
東京大学との共同研究成果を日本機械学会論文集に投稿しています(「多軸医用加工機のための工具経路決定法」日本機械学会論文集 C編 2008 年 74 巻 743 号 p. 1907-1913 ![]() )。
)。